
 La búsqueda de metales y oro es más común de lo que imaginas.
La búsqueda de metales y oro es más común de lo que imaginas. Menciona detector de metales y las reacciones varían: algunos piensan en playas y tesoros enterrados; otros, en seguridad aeroportuaria o escáneres en eventos.
Estos dispositivos son esenciales en ocio, trabajo y seguridad. En aeropuertos, oficinas, escuelas y prisiones, previenen armas. Para aficionados, revelan tesoros (y algo de basura).
En este artículo experto, exploramos su funcionamiento, centrándonos en modelos de consumo, aunque la info aplica a sistemas fijos y portátiles de seguridad.
Contenido- Anatomía de un detector de metales
- Tecnología VLF
- Cambio de fase VLF
- Tecnología PI
- Tecnología BFO
- Tesoro enterrado
- Trabajo de detective
Anatomía de un detector de metales
 Detector de metales Garrett GTI 1500
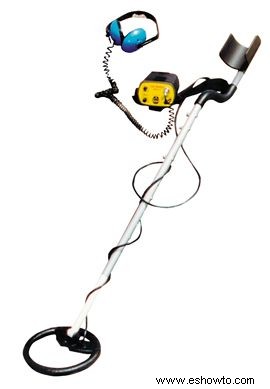
Detector de metales Garrett GTI 1500 Un detector típico es ligero y consta de pocas partes:
- Estabilizador (opcional): mantiene la estabilidad al barrer.
- Cuadro de control: alberga circuitos, controles, altavoz, baterías y microprocesador.
- Eje: conecta control y bobina; ajustable a tu altura.
- Bobina de búsqueda: detecta el metal (también llamada "cabezal", "bucle" o "antena").
Muchos incluyen conector para auriculares; algunos, control en el eje y pantalla superior.
Su uso es sencillo: enciende y barre lentamente el suelo. Una señal audible indica metal. Modelos avanzados muestran tipo y profundidad.
Utilizan tres tecnologías principales, que detallamos a continuación.
Tecnología VLF
 Detector LandRanger de Bounty Hunter con VLF.
Detector LandRanger de Bounty Hunter con VLF. Frecuencia muy baja (VLF) o balanza de inducción es la más popular. Cuenta con dos bobinas:
La bobina transmisora genera un campo electromagnético pulsante que induce campos en objetos metálicos, opuestos al original.
La bobina receptora, blindada al transmisor, capta campos de objetos en el suelo, generando corriente analizada por el control.
La fuerza del campo indica profundidad: más cerca, más fuerte.
Cambio de fase VLF
VLF distingue metales por cambio de fase: diferencia temporal entre frecuencias del transmisor y objeto, por inductancia (alta: mayor fase) y resistencia (alta: menor fase).
Esto permite discriminación: compara con promedios vía demoduladores, notificando por tono o visual.
Filtra por umbral o muescas (rangos específicos). Útil, pero puede omitir valiosos similares a basura.
Tecnología PI
 Detector Garrett con inducción de pulso (PI).
Detector Garrett con inducción de pulso (PI). Inducción de pulso (PI) usa pulsos cortos (100/segundo aprox.) que generan campos magnéticos colapsantes, produciendo pulsos reflejados.
Objetos metálicos prolongan el eco del pulso; circuito de muestreo e integrador lo detectan, convirtiéndolo en audio.
Menos discriminación, pero excelsa en suelos minerales o salinos, y mayor profundidad.
Tecnología BFO
Oscilador de frecuencia de latido (BFO) usa dos bobinas con osciladores desfasados, generando tonos por interferencia de radioondas.
Metal altera frecuencia, cambiando tonos. Simple y barata, pero menos precisa que VLF/PI.
Tesoro enterrado
Detectan hasta 20-30 cm, según tamaño, suelo, mineralización e interferencias.
Aficionados buscan monedas, reliquias, joyas, oro o meteoritos. Únete a clubes en LostTreasure.com.
Trabajo detectivesco
 Detector de paso Garrett.
Detector de paso Garrett. Usos profesionales: seguridad (PI fijos, BFO portátiles), arqueología, tuberías ocultas, etc.
 Detector portátil Garrett Super Scanner.
Detector portátil Garrett Super Scanner. Innovaciones constantes mejoran precisión y versatilidad.